この連載では、モノづくり企業と宇宙テック/宇宙ビジネスのつながりや活用事例を、4つの技術領域ごとに解説していきます。第3回となる今回のテーマは「宇宙技術の地上への波及:新たなビジネス機会を引き寄せる宇宙ロボティクス」です。前編の5つの要素技術に続き、後編では具体的な企業事例などを紹介します。
宇宙ロボティクスの進歩を牽引する先端技術
前編ご紹介した重要な制御システムやパワーシステムなどそれぞれの要素技術に対して、具体的な技術と製品を通じて、どのように宇宙ロボティクスが進化し、それがどのようにわれわれの生活や社会に影響を与え得るかを見ていきましょう。
1. 制御システム
宇宙ロボティクスの進歩において、制御システムは重要な要素となっています。近年の進歩度合いを具現化した2つの技術例、Hyundai Motor Companyの開発した車両と歩行の双方が可能なロボット「TIGER」、そしてForce Dimensionによる触覚フィードバックを実現するエンドエフェクタ「lambda.7」についてご紹介しましょう。
2021年に韓国の自動車メーカー、Hyundai Motor Companyは、その可能性を具現化したロボット「TIGER」を開発しました。TIGERは四輪走行と四脚歩行の双方が可能なロボットで、平坦な地面では四輪駆動車として、また障害物や段差のある地形では四足移動で乗り越えることが可能です。その機動力と軽量性から、無人航空機(UAV)で運搬することも考えられています。これらの特性は、科学探査だけでなく災害時の救援物資の配達など、さまざまなシチュエーションで活用できると考えられています。さらに、無人宇宙ロボットとして開発が進められている点からも、自動車業界の宇宙分野への関与を見ることができます。

(出典:HYUNDAI公式ウェブサイト)
一方、スイスのForce Dimensionは2017年に「lambda.7」という触覚フィードバックを実現するエンドエフェクタを開発しました。この技術は医療用途に特化しており、外科手術での遠隔操作を可能にするなど、繊細な触覚フィードバックを実現しています。同社の製品はその高い精度と透明性から、特に外科手術などの医療用途において大きな可能性を秘めています。またその適用範囲は医療分野にとどまらず、宇宙探査や海底探索ロボットなどにも応用できるとされています。なかでも同社と欧州宇宙機関(ESA)との協力により、国際宇宙ステーション上で同社の製品を動作させることに成功した事例は、その宇宙分野への貢献度を物語っています。

(出典:Force Dimension公式ウェブサイト)
これら2つの例からも、ロボット技術の進化とその可能性は日々広がっています。そしてそれらは、私たちがまだ足を踏み入れることのできない宇宙の探査を可能にするだけでなく、人間の生活をより良くするための新たな可能性を開いています。
2. 自律性
宇宙探査ロボットの活動において、通信遅延や中断に対する耐性と、即座に未知の状況に対応できるための自律性を実現するために、世界中の技術者たちが先進的なソフトウェアやシステムを開発しています。今回は、Olis Roboticsが開発した通信遅延時でも作業が自律的に続行できる「Olis CoreOS」と、Real-Time Innovations(RTI)が開発したリアルタイムのリモート操作を可能にするソフトウェアフレームワーク「Connextバージョン6.1」の2つの技術例に焦点を当てて見ていきましょう。
Olis RoboticsのOlis CoreOSは、通信遅延や通信エラーが発生する環境でも、ロボットが自律的に作業を継続する遠隔操作プラットフォームを提供します。このシステムは機械学習を活用し、リモートからでもロボットの作業能力を最大限に引き出すことが可能です。特にOlis CoreOSは、宇宙(月面)用ロボットへの適用を視野に入れて開発されており、宇宙技術企業のMaxarがこのソリューションを月でのAI駆動のロボット操作に活用することを2019年に発表しています。

(出典:Olisのプレスリリース)
さらにOlis Roboticsの「Olis Connect」は、遠隔でのロボットエラー回復機能を提供します。通信エラーや停止状態の発生時でも、ブラウザから直接ロボットを操作し、生産を再開させることが可能です。これによりロボットの自律性を高めるだけでなく、生産効率の向上にも貢献しています。これらの技術を用いることで、通信遅延やエラーが頻発する宇宙環境でも、ロボットの作業能力を最大限に引き出すことが可能となります。

(出典:Olis公式ウェブサイト)
もちろん自律性と組み合わせて人間が宇宙空間でミッションをこなすためには、強固な通信技術も重要です。Real-Time Innovations(RTI)が開発したConnextバージョン6.1はその一端を担っており、可変性の高いローカルネットワーク(LAN)およびワイドエリアネットワーク(WAN)間の高速通信をサポートし最適化する能力を持っています。この技術はあらゆる種類のマシン、システム、サードパーティアプリケーションとの接続を可能にします。
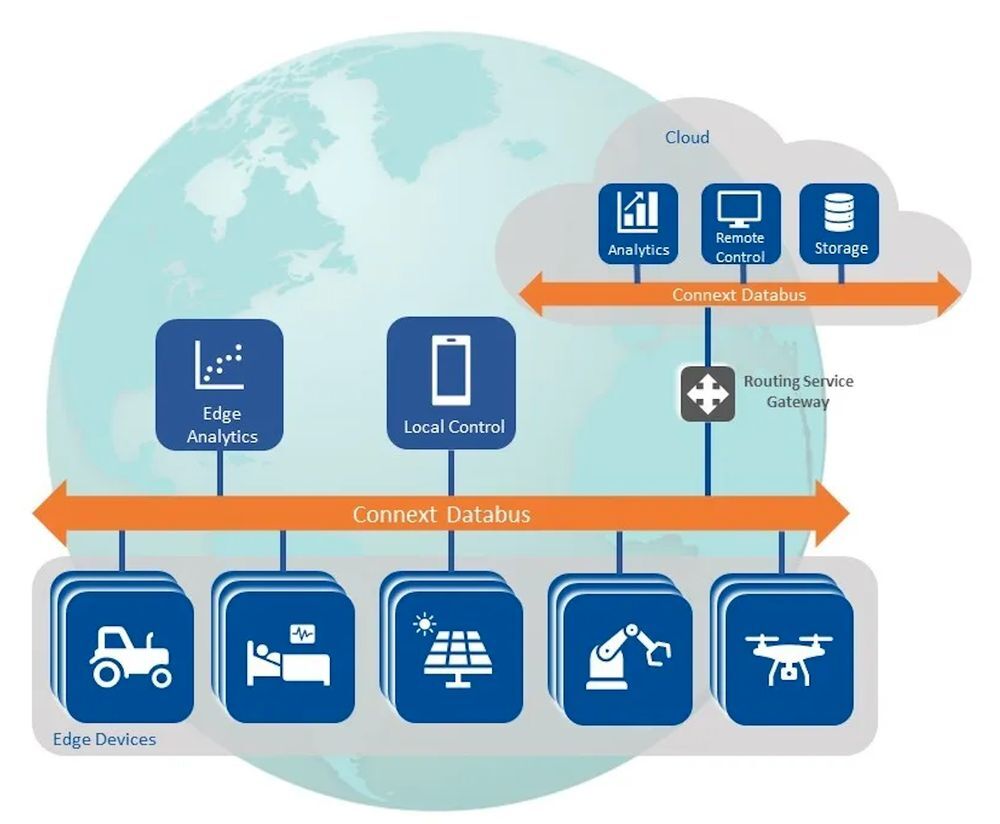
(出典:RTI公式ウェブサイト)
Connextの強力な通信フレームワークは、地球上だけでなく、宇宙における遠隔操作の課題にも対応しています。その最も顕著な実績として、2008年に始まったNASAのHuman Exploration Telerobotics(HET)プロジェクトでConnext DDSが採用され、地球と国際宇宙ステーション、そして他の惑星表面との間での信頼性の高い通信を実現しました。これによりシステムの移動に伴ってネットワーク接続が変化した場合でも、接続がシームレスで安全になり、情報を失うことなくリモート操作をリアルタイムで続行できます。NASAは他のプロジェクトでも20年以上同社の技術を採用しており、宇宙分野における高い信頼性が伺えます。

(出典:RTI公式ウェブサイト)
一方、地球上における応用例としては、2023年にMusashiAIのスピンアウト企業であるイスラエルの634AIが開発した自律移動ロボット(AMR)を集中制御する「MAESTRO」システムでの活用が挙げられます。Connextはシステム間のリアルタイム接続と、堅牢でスケーラブルな接続システムの構築を実現し、重要なデータのレイテンシがほぼゼロで、Wi-Fiネットワーク上でリアルタイム接続を保証する能力により、各種ロボットやシステム間の相互運用性を実現しました。これにより、移動ロボットの複雑な問題を解決し、製品と技術の革新により重点を置くことができるようになりました。
(出典:634AI公式ウェブサイト)
これらの先進的な技術は、通信環境の困難さを克服し、遠隔操作ロボットがさらに広範囲での活動を可能にするための重要な基盤を提供します。特に宇宙分野では、通信遅延や通信エラーが避けられない事情が多いため、これらの技術の活用はロボットの適用範囲を大きく拡大します。
3. パワーシステム
宇宙で適用可能なエネルギー供給システムにおいても様々な興味深い技術が開発され、遠隔操作ロボットの進歩に貢献しています。特に、モーションからエネルギーを生成する「エネルギーハーベスティングジェネレーター」を開発したWePower Technologiesと、無線給電におけるアンテナ間距離に応じて動的に伝送効率を向上させるワイヤレス給電システムを開発したWiBotic Inc.の取り組みは注目に値します。
WePower Technologiesが開発した「エネルギーハーベスティングジェネレーター」は、モーションからエネルギーを生成することが可能です。この技術は2018年に同社が特許を出願・登録しており、磁場形成と集中に永久磁石を使用して、電磁誘導によって高いエネルギー出力を生成します。これにより、ロボットがバッテリーや有線電源を必要とせずに動作し、長距離で信頼性の高いセンサー情報を送信することが可能になります。さらに、定期的なバッテリー交換の必要性を排除することで、IoT機器の最も大きな寿命問題の一つを解決します。
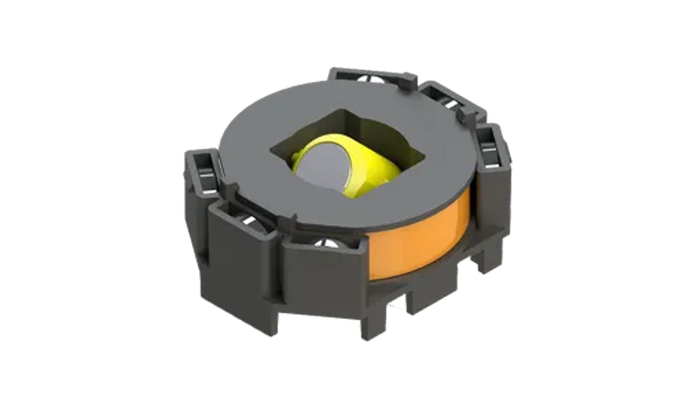
(出典:WePower Technologies公式ウェブサイト)
この技術は、自動車、エネルギー、産業、スマートホーム、照明、スマートビルディング、航空宇宙アプリケーションなど幅広い産業での応用が期待されています。
一方、WiBoticが開発したワイヤレス給電システムは、アンテナ間の相対位置に基づいて、ハードウェアとファームウェアのパラメータを動的に調整するアダプティブマッチング方式を採用し、アンテナ間の伝送効率を大幅に向上させています。システム全体の効率は85%で、アンテナ間の伝送効率は95%に達します。飛行ロボット、モバイルロボット、海洋ロボット、宇宙ロボット、産業ロボットなど、過酷な条件下でも動作するロボットの充電システムに適用可能です。
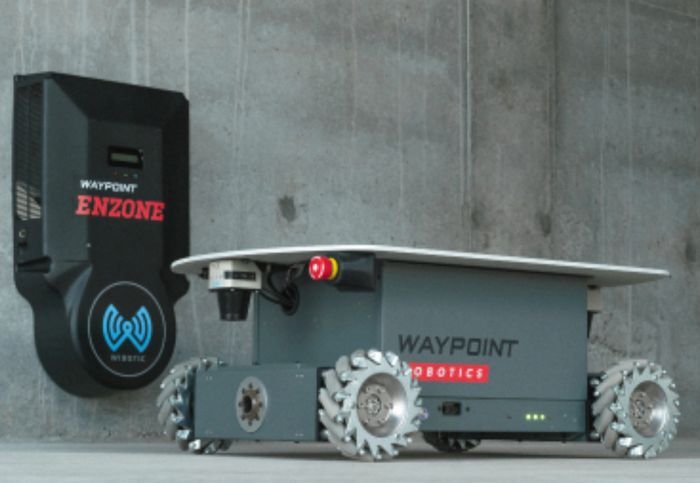
(出典:WiBotic公式ウェブサイト)
この技術の注目すべき実績として、2021年にNASA、Astrobotic、Bosch、およびワシントン大学とのパートナーシップを通じて、月面上のローバーに電力を供給するワイヤレス充電システムを提供したことが挙げられます。このシステムは完全に密封されているため、月面の塵やレゴリスの影響を受けずに給電が可能です。同社は、2024年に同社初の宇宙認定システムがリリース予定とのことです。
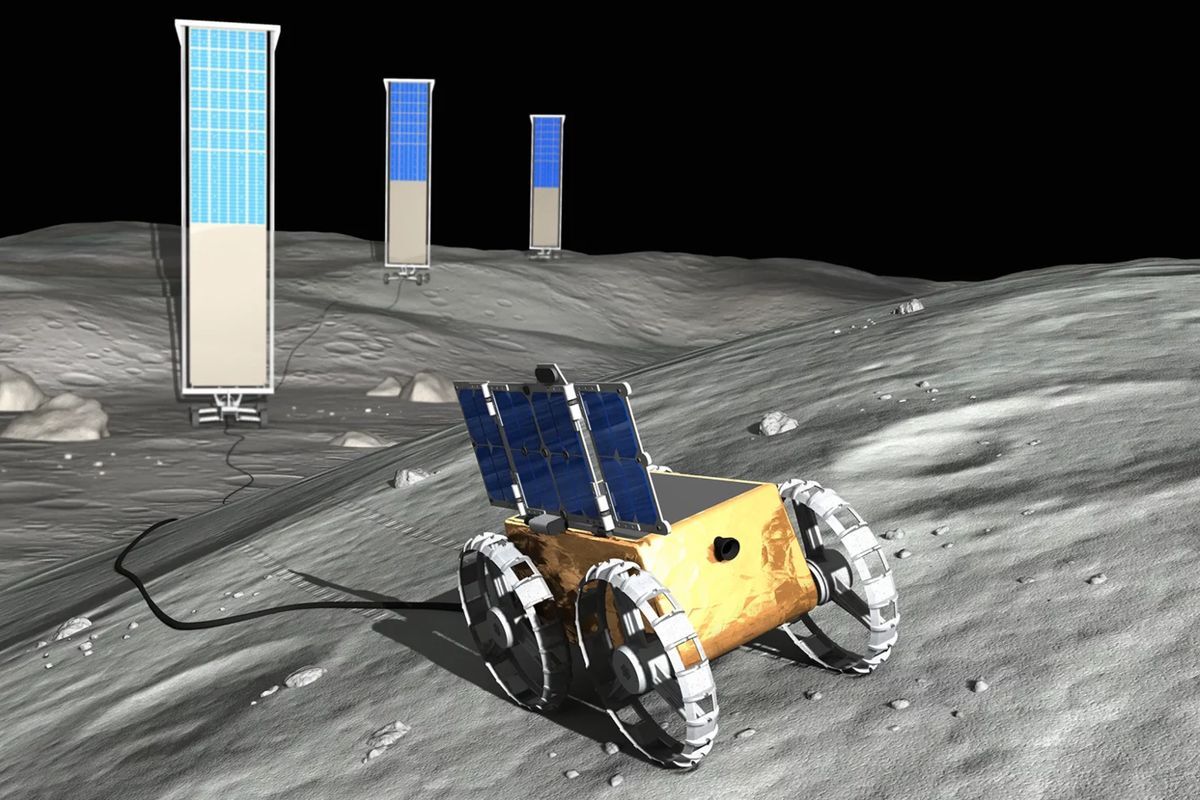
(出典:WiBotic公式ウェブサイト)
これらの先進的なパワーシステム技術は、エネルギー供給の問題を克服し、遠隔操作ロボットがさらに広範囲での活動を可能にするための重要な基盤を提供します。特に宇宙分野ではエネルギー供給が課題となることが多いため、これらの技術の活用はロボットの適用範囲を大きく拡大します。
4. ロボットアームとマニピュレータ
ロボットアームとマニピュレータの革新は物体の操作と移動を実現するための鍵となる技術であり、探査ロボットがより複雑で精密なタスクを遂行するために不可欠です。
ここで注目するのは、「シャクトリ虫」型ロボットアーム「GITAI ロボットアームIN1」を開発したGITAI Japan、音響波を利用した遠隔物体マニピュレーション技術を開発したミネソタ大学のOgnjen Ilic教授らの研究グループ、そして量子トンネル効果を利用したフィルム状の力覚センサー「eDermis」を開発した英国のTouchlab Limitedの取り組みです。
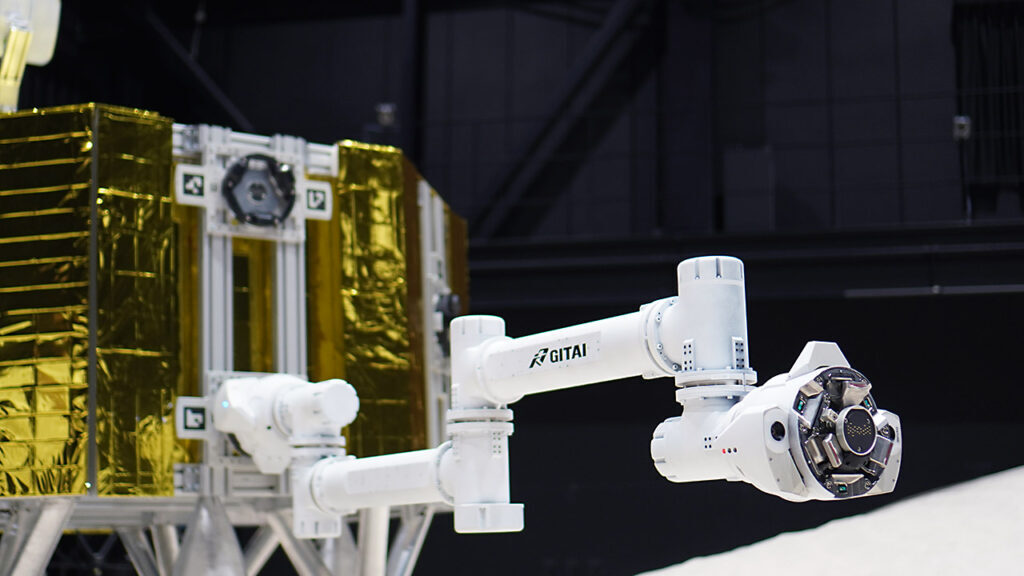
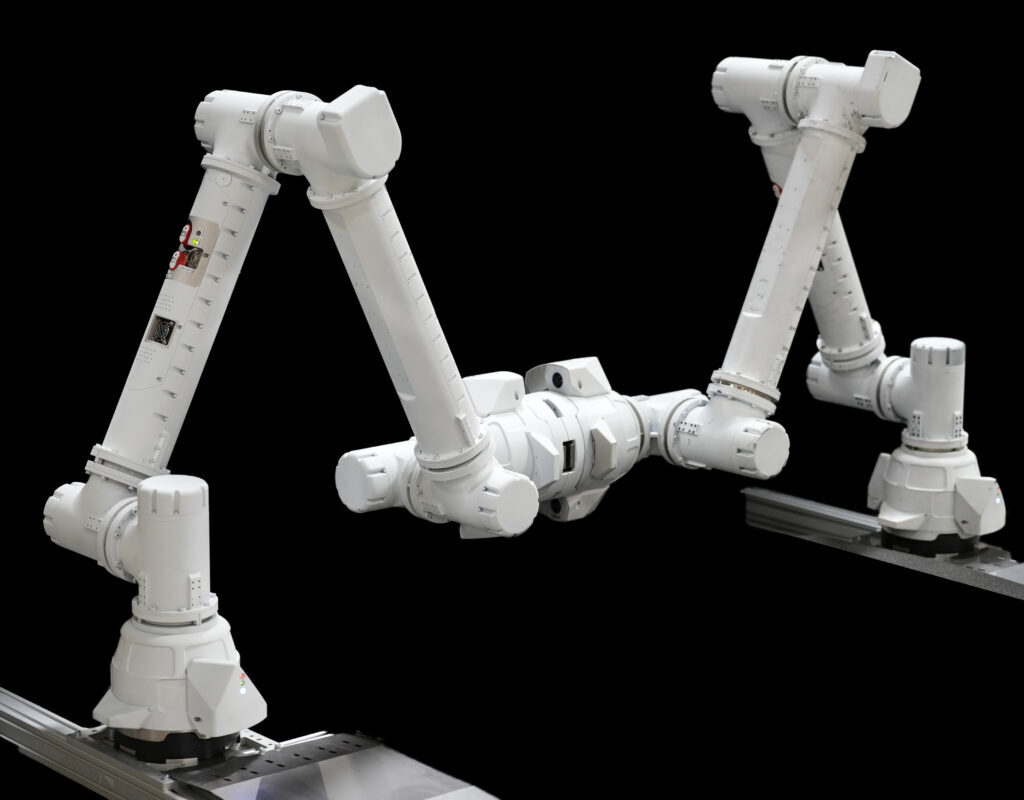
GITAI Inchworm One(IN1)は、2022年にGITAI Japanによって開発された「シャクトリ虫」型ロボットアームです。このアームの最大の特長は、両端に取り付けられた「グラップルエンドエフェクタ」です。これは同社独自のインターフェースで、ツールの交換を容易にし、かつ複数種類の作業が可能となることで作業パフォーマンスを向上させます。
(出典:GITAI公式ウェブサイト)
さらに、アーム両端のエフェクタが施設壁面など複数箇所に設置された「グラップルフィクスチャ」と接続したり、切り離したりすることでアーム自体が自律的に移動可能になります。アーム同士も同様に機械・電力・通信の結合が可能であり、アーム延長、また給電しながらのエンドエフェクタツールおよびその他のデバイスの操作を可能にします。
(出典:GITAI公式ウェブサイト)
この新しいロボットアームの開発により、一連の作業、たとえば月面での資源採取や掘削作業を遠隔操作で実現することが可能となりました。また民間の宇宙ステーション建設や船外作業、メンテナンス作業にも大きく貢献します。
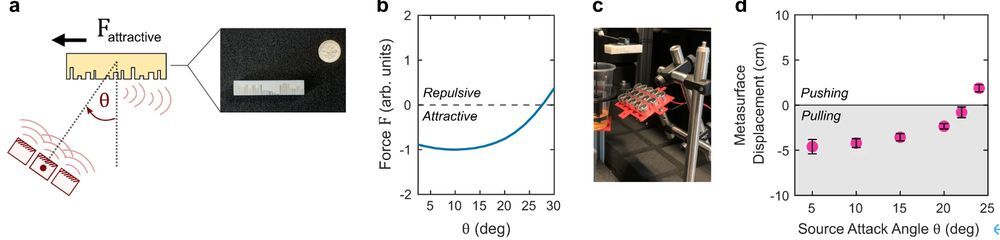
物体を動かす方法は、アーム以外でも広く研究されています。2022年11月にミネソタ大学のOgnjen Ilic教授らの研究グループは、音響波を利用した遠隔物体マニピュレーション技術を開発し、その結果をNature Communications誌に発表しました。この技術は、物体全体の形状やサイズに依存せず、メタサーフェス(特殊な表面構造)が音響波を受けることで、生み出される力の方向を制御することが可能です。このマニピュレーション技術は、誘導薬剤送達やロボット手術、非接触で制御が必要な場面での応用が期待されています。
(出典:Nature Communications誌掲載同社論文(DOI:10.13020/zkrr-ny94))
さらに重要な点は、この技術が音響波に限定されないことです。この技術における同じ波動物理学は光/電磁波にも当てはまります。宇宙空間には空気が存在しないため音響波によるマニピュレーションはできませんが、光など他の波に適用することが可能と考えられているため、今後、この技術の発展により宇宙空間での長距離アクチュエーションや「光ピンセット」のような遠隔操作技術など、新たな可能性が広がりいます。
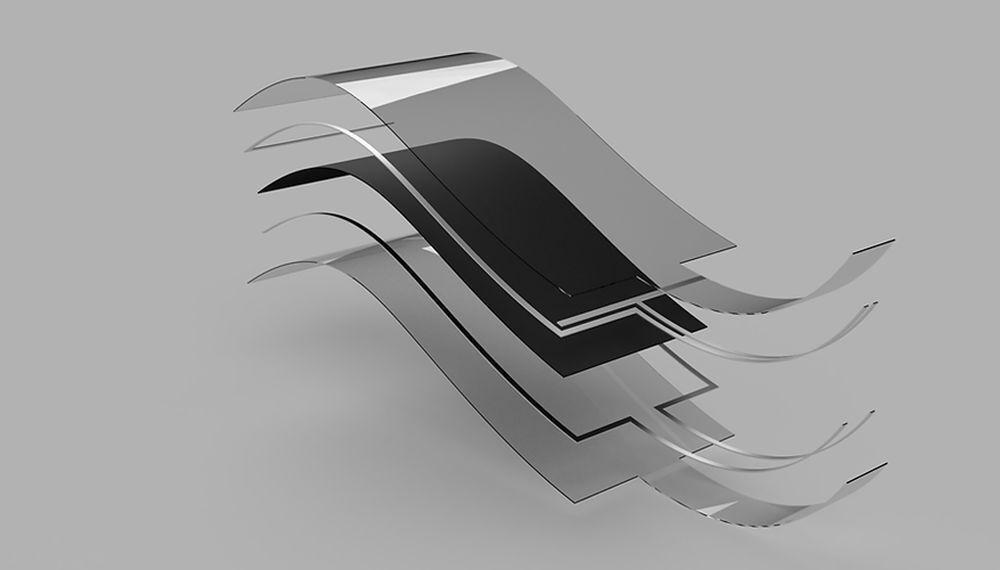
ロボットが物体に行った動作と状態を精密に知るためには、力覚センサーなどのセンシング技術も重要です。英国のTouchlabが開発した「eDermis」は、量子トンネル効果を利用したフィルム状の力覚センサーです。その薄さはわずか0.2mmという極薄さで、66mm×30mmのサイズに量子トンネル材料およびピエゾ抵抗材料を含む3層構造となっています。
このセンサーは、力で0.01〜30N、応力で500Pa〜160kPaの範囲を測定でき、その柔軟性を利用して固定された曲面に貼り付けることが可能です。また、曲率の変わる曲面に貼り付けても100万回以上の屈曲に耐えることが可能です。
(出典:Touchlab公式ウェブサイト)
特筆すべき点として、このセンサーは力の大きさだけでなく、作用点のXY座標もリアルタイムに計測可能なため、ロボットは人間の皮膚のような触覚を持つことが可能になります。
「eDermis」はロボットの動作が難しい環境で繊細な物体を扱うためのセンサーとして考案され、特に宇宙空間や危険な環境での活用が期待されています。
これらの技術は、遠隔操作ロボットが広範囲で活動を展開するための重要な基盤を築きます。特に宇宙分野では、探査ロボットの機能性と適用範囲を大きく広げることができ、未知の領域へのアクセスを可能にします。各要素技術が相互に補完しあいながら、遠隔操作と精密な物体操作の新たな可能性を開拓しています。
5. 極端条件対応材料
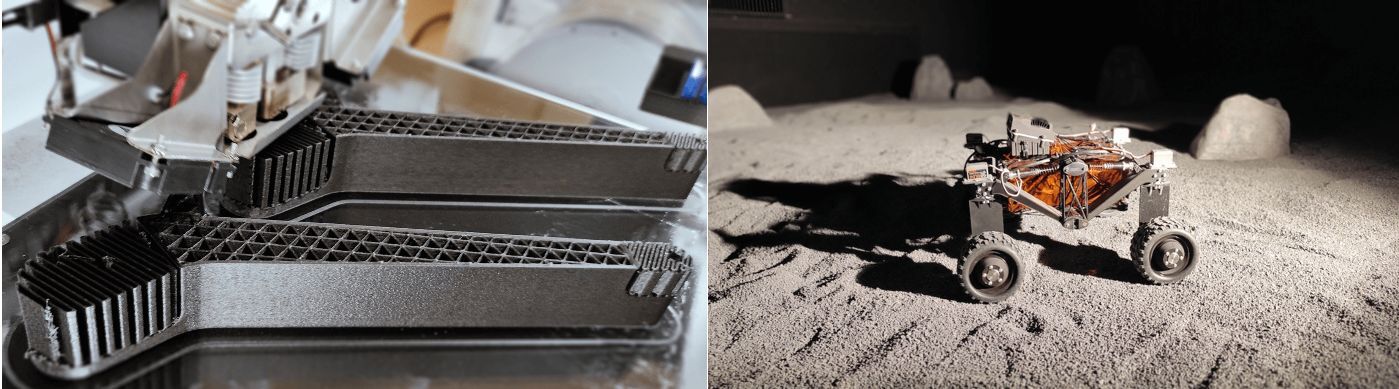
宇宙探査ロボットの性能を向上させ、極端な環境下での耐性を確保するためには、高温や低温、真空、放射線に対応した材料技術と防塵技術が必要不可欠です。その一例として、2021年にルクセンブルクのAnisoprint社が開発した連続炭素繊維複合材料3Dプリンター技術と3Dプリンター用のポリアミド材料SmoothPAが挙げられます。
この技術は宇宙関連で世界最大のハッカソン「ActInSpace 2020」で優勝した学生チームにより月面ローバー車両の開発に活用されました。彼らの使用したCFC(Composite Fiber Co-extrusion)技術とSmoothPA材料により、64gのコントロールアームと24gのホイールマウントが作成され、従来の材料に比べて非常に軽量なモジュール形成を達成しました。この3D印刷技術は金属より軽くて強い製品製造を可能にし、スポーツ用品、ロボット、クアッドコプター、医療用義肢・装具など多岐にわたる分野への応用が見込まれています。
(出典:どちらもAnisoprint掲載同社公式ウェブサイト)
一方で、ロボットとともに作業を行う宇宙飛行士の活動を支援するための先端材料技術も目覚ましい進展を遂げています。2022年にArmorworks Enterprisesが開発したダスト軽減機能を備えた環境保護衣服は、その一例であり、NASAが長らく課題としてきた、月面の粉塵からの保護という問題に取り組むためのSmall Business Innovation Research(SBIR)プログラムから資金援助を受けています。同社が独自開発したシェル生地と高強度の導電性繊維生地を組み合わせて作られたこの衣服は、月の粉塵およびマイクロメテオイドから保護する特性を持ちつつ、全体の重量を25%軽減しています。
また、SBIRプログラムに参加している他の材料開発企業も注目すべきです。米国のSmart Material Solutions社は、重要な機器部品を保護するためのパッシブなダスト対策技術を開発しています。彼らが開発したナノテクスチャ技術は、月面の粉塵模擬物質を93%削減することが実証されています。これらの進展により、宇宙飛行士の安全と装備の保護がさらに強化されることが期待されています。
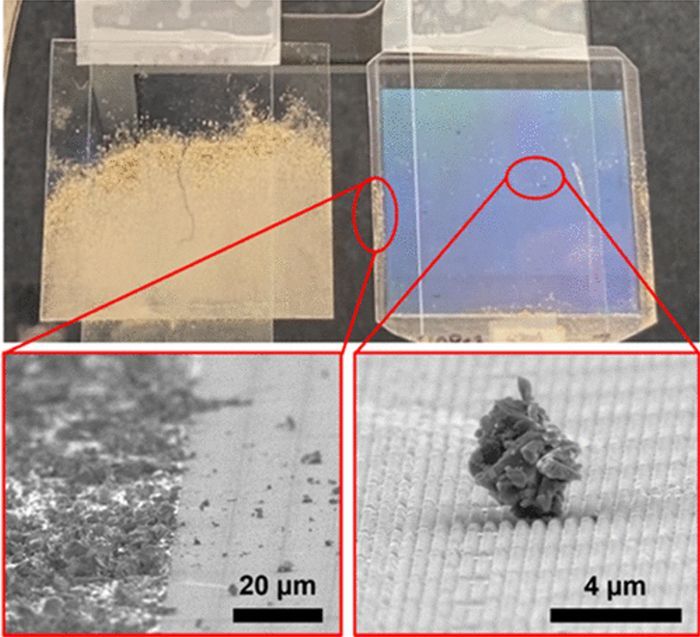
(出典:ACS Applied Materials and Interfaces誌論文(DOI:10.1021/acsami.2c19211))
材料技術の進展は、ロボット技術や人間の活動の可能性を広げる基礎となります。ロボットと人間の共同作業における適用範囲の拡大、安全性の向上、効率性の改善につながるこれらの技術は、宇宙探査やその他のハイテク分野でのイノベーションを牽引する重要な要素となり、より大胆で幅広い活動を可能にします。
最後に
本記事では、制御システムから材料技術までの様々な要素技術分野において、宇宙ロボティクスの進化を牽引している事例を複数ご紹介しました。これらの技術情報は、私たちがこれまで幅広い分野で行ってきた技術調査の成果のごく一部です。私たちのこの技術データベースと調査ノウハウは、各業界の企業における応用研究や先行開発など、多様な調査目的に活用されています。本記事の宇宙ロボティクス分野の探求が、皆様の新たな可能性を引き出す一助となることを願っています。
私たちは今後も最新の技術動向を追求し、情報を更新していきます。特定の調査目的に対してさらに深く探求が必要な場合、私たちの技術調査により参考になる情報を提供することも可能です。
■アンケートのお願い
記事をご高覧いただき誠にありがとうございます。恐れ入りますが、今後のサービスの品質向上のため、皆様のご状況やご意見を伺いたく、こちらのアンケートにご協力いただければ幸いです。(回答所要時間:約1分)
■リンカーズについて
リンカーズはものづくり企業に向けたオープンイノベーション支援をしています。技術パートナー探索やユーザー開拓など、ものづくり企業の様々な課題に対してビジネスマッチングを軸にしたソリューションをご用意しております。本記事も、弊社のLinkers Researchをはじめとした調査活動で得た情報を活かして作成しております。Linkers Researchはお客様の業務目的に合わせたグローバル先端技術調査 サービスです。世界の先端技術動向を大企業・中小企業・スタートアップ・アカデミア問わず調査します。お問合せはこちら。
■著者について
蒲原知宏
リンカーズ株式会社リサーチプラットフォーム事業本部 オープンイノベーション研究所プロジェクトマネージャー 博士(工学)
東京工業大学大学院 理工学研究科修了。東陽テクニカにて、自動車ソフトウェア向け静的コードチェッカーや大容量デジタルアセットの高速管理ソフトウェアの技術営業に従事。その後、シーメンスにて構造物振動計測・解析、および騒音源探査ソリューションのプリセールスを行う。2020 年よりリンカーズに入社し、オープンイノベーション研究所のプロジェクトマネージャーとして、自動車、建設、ヘルスケアなど、多岐にわたる最新技術動向調査を行う。
from "応用" - Google ニュース https://ift.tt/Ao7sc6p
via IFTTT
Bagikan Berita Ini














0 Response to "地上にも応用される「宇宙ロボ技術」(後編)--触覚フィードバック ... - CNET Japan"
Post a Comment